Ultima revisione 30 maggio 2026
Gradi di Qualità di Equilibratura secondo ISO 21940-11: Come Scegliere la Tolleranza Corretta per le Vostre Apparecchiature
La qualità dell'equilibratura dovrebbe essere valutata non soggettivamente ("la vibrazione è diminuita") ma rispetto a criteri oggettivi e misurabili. Le norme internazionali stabiliscono requisiti chiari per lo squilibrio residuo ammissibile dopo l'equilibratura.
Il documento chiave è ISO 21940-11 (ex ISO 1940-1:2007), "Vibrazioni meccaniche — Equilibratura del rotore — Procedure e tolleranze per rotori con comportamento rigido".
Perché le norme sono necessarie:
- Trasformano un giudizio soggettivo in un criterio oggettivo e misurabile
- Servono come base per l'accettazione del lavoro da parte del cliente
- Trovano l'equilibrio tra necessità tecnica e senso economico
- Proteggono sia l'appaltatore che il cliente in caso di controversia
Cos'è un grado G, in linguaggio semplice
Il grado di qualità di equilibratura (denotato dalla lettera G) definisce lo squilibrio residuo ammissibile dopo l'equilibratura. Minore è il numero G, più severo è il requisito di precisione dell'equilibratura.
Significato fisico: il numero G è uguale alla velocità orbitale del baricentro del rotore alla sua velocità di esercizio — il prodotto dello squilibrio specifico ammissibile per la velocità angolare (eper × Ω), espresso in mm/s. Ad esempio, il grado G6,3 corrisponde a 6,3 mm/s.
Importante: si tratta di una proprietà dello squilibrio residuo, non della velocità di vibrazione della carcassa o dell'alloggiamento del cuscinetto misurata su una macchina in funzione secondo ISO 20816-3. I due valori sono correlati ma non coincidono.
Un principio importante: ogni tipo di apparecchiatura ha il proprio grado di qualità di equilibratura raccomandato, che rimane costante indipendentemente dalla velocità di rotazione o dalla massa del rotore. Ad esempio:
- Frantoi → sempre grado G16
- Ventilatori e pompe → sempre G6,3
- Turbine → sempre G2,5
- Mandrini → sempre G1,0 o G0,4
Tabella dei gradi G di qualità di equilibratura per diverse apparecchiature
| Grado G | Velocità di vibrazione ammissibile (mm/s) | Tipo di apparecchiatura | Esempi di rotori |
|---|---|---|---|
| G4000 | 4000 | Equilibratura molto grossolana | Alberi a gomito rigidamente montati di motori diesel marini lenti (con numero dispari di cilindri) |
| G16 | 16 | Equilibratura grossolana | Frantoi, alberi di macchine agricole, alberi di trasmissione (cardanici) |
| G6,3 | 6,3 | Qualità industriale standard | Rotori di pompe, giranti di ventilatori, armature di motori elettrici, componenti di apparecchiature di processo |
| G2,5 | 2,5 | Qualità superiore | Rotori di turbine a gas e a vapore, turbocompressori, trasmissioni per macchine utensili, armature di motori elettrici per impieghi speciali |
| G1,0 | 1,0 | Equilibratura di precisione | Trasmissioni di rettificatrici, mandrini |
| G0,4 | 0,4 | Equilibratura di ultra-precisione | Mandrini di rettificatrici di precisione, giroscopi |
← Vedi anche la sezione sui gradi di qualità di equilibratura nella guida completa
Come calcolare lo squilibrio residuo ammissibile
ISO 21940-11 consente di calcolare un valore specifico per lo squilibrio residuo ammissibile, che serve come valore obiettivo durante l'equilibratura.
Il calcolo si effettua in due fasi:
Fase 1: Determinazione dello squilibrio specifico ammissibile (eper)
Formula:
eper = (G × 9549) / n
Dove:
- G — il grado di qualità di equilibratura (ad esempio, 6,3)
- n — la velocità di rotazione di esercizio, giri/min
- eper — lo squilibrio specifico ammissibile, μm (o g·mm/kg)
Fase 2: Calcolo dello squilibrio residuo ammissibile (Uper)
Formula:
Uper = eper × M
Dove:
- M — la massa del rotore, kg
- Uper — lo squilibrio residuo ammissibile, g·mm
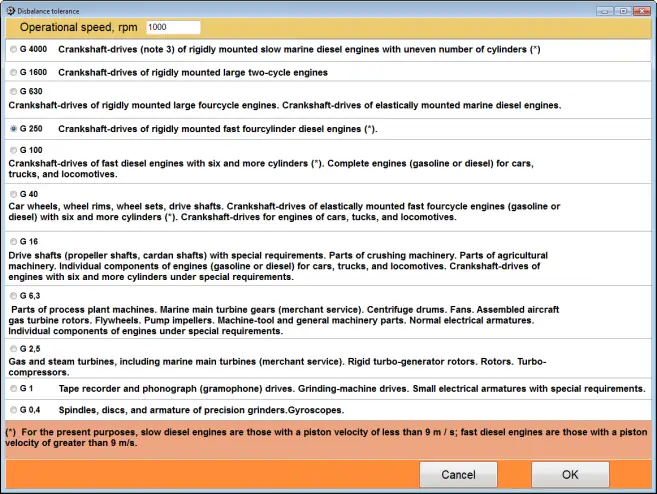
Fig. 1. La finestra di calcolo della tolleranza di equilibratura nel software Balanset-1A: calcolo automatico secondo ISO 1940-1
Equilibratura con verifica rispetto agli standard
Eseguiamo l'equilibratura con la tolleranza calcolata secondo ISO 21940-11 e rilasciamo un certificato di conformità
Ordina il servizioEsempi risolti
Esempio 1: un ventilatore industriale
Dati di ingresso:
- Massa del rotore (girante + albero): M = 150 kg
- Velocità di esercizio: n = 1500 giri/min
- Grado di qualità di equilibratura: G = 6,3 (standard per i ventilatori)
Calcolo:
- eper = (6,3 × 9549) / 1500 = 40,1 μm (g·mm/kg)
- Uper = 40,1 × 150 = 6015 g·mm
Conclusione: dopo l'equilibratura, lo squilibrio residuo non deve superare 6015 g·mm (o ~6000 g·mm arrotondato).
Esempio 2: un rotore di motore elettrico da 30 kW
Dati di ingresso:
- Massa del rotore: M = 25 kg
- Velocità di esercizio: n = 3000 giri/min
- Grado di qualità di equilibratura: G = 2,5 (qualità superiore)
Calcolo:
- eper = (2,5 × 9549) / 3000 = 7,96 μm
- Uper = 7,96 × 25 = 199 g·mm
Conclusione: il motore richiede un'equilibratura più accurata (grado G2,5 invece di G6,3) perché funziona ad alta velocità.
Esempio 3: un mandrino di rettificatrice
Dati di ingresso:
- Massa del mandrino con il suo utensile: M = 5 kg
- Velocità di esercizio: n = 6000 giri/min
- Grado di qualità di equilibratura: G = 1,0 (equilibratura di precisione)
Calcolo:
- eper = (1,0 × 9549) / 6000 = 1,59 μm
- Uper = 1,59 × 5 = 7,95 g·mm
Conclusione: per i mandrini di precisione ad alta velocità i requisiti sono molto severi — lo squilibrio specifico ammissibile (eper) è circa 25 volte più piccolo che per i ventilatori.
Applicazione pratica: se il rapporto finale di equilibratura mostra che lo squilibrio residuo rientra nella tolleranza ISO calcolata, il lavoro è considerato eseguito ad alto standard. Questo è un criterio oggettivo e giuridicamente significativo.
Il collegamento con la vibrazione delle apparecchiature
Oltre a ISO 21940-11 (la tolleranza di squilibrio), esiste ISO 20816-3:2022 — che ha sostituito la ormai ritirata ISO 10816-3 — che regola i livelli di vibrazione ammissibili delle apparecchiature misurati sugli alloggiamenti dei cuscinetti. Classifica le macchine in gruppi e 2 tipi di fondazione (rigida/flessibile).
| Gruppo macchina | Potenza (P), kW | Limiti delle zone (mm/s) | ||
|---|---|---|---|---|
| A/B Buono |
B/C Accettabile |
C/D Allarme |
||
| Gruppo 1 (Macchine grandi) |
P > 300 kW | 2,3 | 4,5 | 7,1 |
| Gruppo 2 (Macchine medie) |
15 kW < P ≤ 300 kW | 1,4 | 2,8 | 4,5 |
Nota: dati per macchine su fondazioni rigide.
Decodifica delle zone di condizione:
Zona A: Buono
La condizione delle nuove apparecchiature. Non è necessaria alcuna azione.
Zona B: Accettabile
Il funzionamento senza restrizioni è consentito. Si raccomanda il monitoraggio.
Zona C: Temporaneamente accettabile
Le apparecchiature necessitano di diagnostica per trovare ed eliminare le cause della vibrazione.
Zona D: Inaccettabile (Allarme)
La vibrazione può causare danni. È richiesto un arresto immediato e una riparazione.
Livelli di vibrazione critici:
- Oltre 7 mm/s è già considerato pericoloso secondo ISO — l'unità dovrebbe essere fermata per la diagnostica per prevenire la distruzione dei cuscinetti e della carcassa
- Oltre 10 mm/s può portare a cricche da fatica nelle saldature della carcassa e al rapido guasto dei componenti. Questa è la zona critica!
I due standard si completano a vicenda: ISO 21940-11 definisce la qualità obiettivo dell'equilibratura, mentre ISO 20816-3 valuta le condizioni di vibrazione effettive della macchina.
Conclusione
ISO 21940-11 non è semplicemente un requisito formale ma uno strumento pratico per assicurare la qualità dell'equilibratura. Consente di:
- Valutare oggettivamente la qualità del lavoro svolto
- Scegliere un livello di precisione economicamente giustificato
- Proteggere gli interessi sia del cliente che dell'appaltatore
- Fornire una prova documentale della qualità
I moderni strumenti di equilibratura come il Balanset-1A dispongono di un calcolatore di tolleranza integrato secondo ISO 1940-1 che calcola automaticamente i valori obiettivo e confronta i risultati raggiunti con essi.
Vedi anche: i tipi di squilibrio e come ognuno viene corretto
Equilibratura secondo le norme ISO
Strumenti e servizi con tolleranze calcolate secondo le norme
Lo strumento Balanset-1A
Calcolatore di tolleranza integrato secondo ISO 1940-1
Acquista lo strumentoServizi di equilibratura
Equilibratura con calcoli secondo ISO e certificato di conformità
Ordina il servizioLista di controllo rapida
- Scegliere il grado G in base al tipo di apparecchiatura
- Registrare la velocità di esercizio (giri/min) e la massa del rotore
- Calcolare e_per = (G x 9549) / n
- Calcolare U_per = e_per x M
- Confermare che lo squilibrio residuo rientri nella tolleranza
- Emettere un certificato di conformità